Orange Harvesting Robot (September 2022 ~ December 2022)
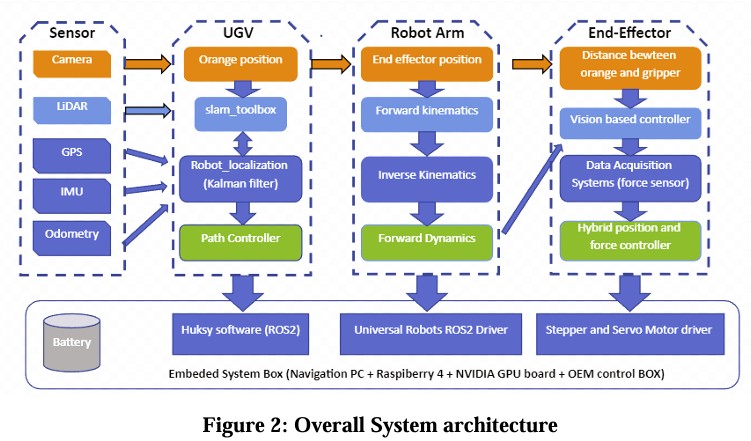
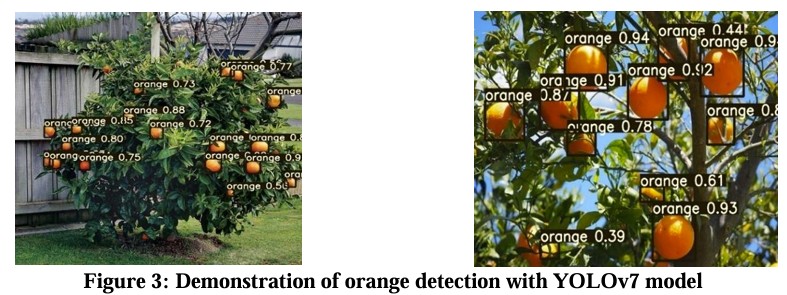
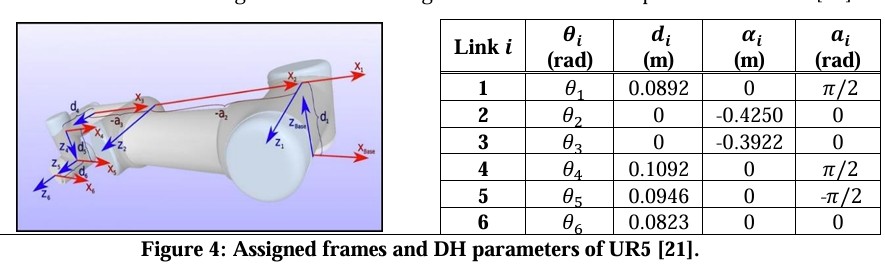
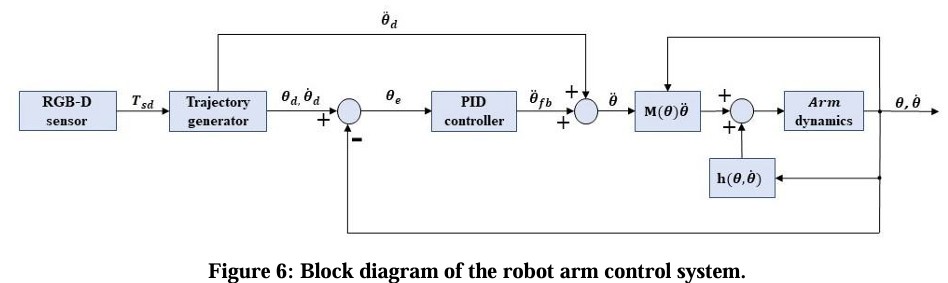
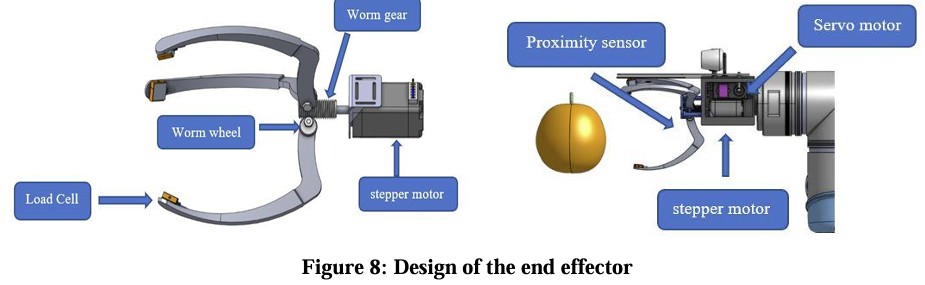
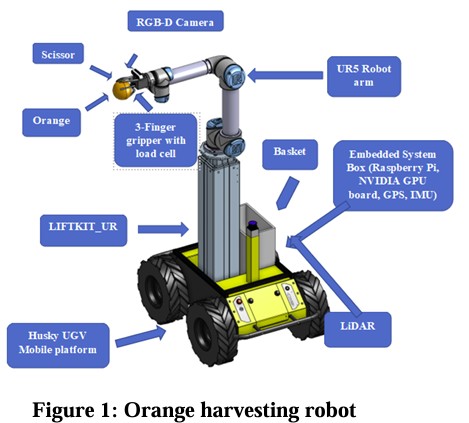
Agriculture is one of the most important industries for people to maintain their lives and harvesting oranges is a typical example. However, nowadays, the population of farmers gradually decreases, and the average age of farmers increases. Especially, the aging population problem in agriculture has a significant impact on orange farming. Compared to fruits such as strawberries and tomatoes, harvesting oranges is difficult and requires a lot of energy because they grow on tall trees. As a result, the labor cost to farm orange increases and orange farms has many difficulties. One of the most effective solutions is to use the harvesting robot that could replace manpower. In this project, the sensing for detecting, the mathematical models and control system for the robot arm, the end effector for harvesting the orange will be developed. The overall system based on ROS2 will be designed to integrate each system into one system. For sensing, RGB-D sensor with YOLOv7 model will be used to detect orange. To control the manipulator, the feedforward plus PID feedback controller will be designed based on the mathematical models. As an end effector, three fingers gripper with a scissor will be designed to harvest orange. The development of the orange harvesting robot can contribute to solving the aging problem effectively and improving the efficiency of harvesting oranges.