
AVA: Autonomous Vehicle for All (May 2022 ~ August 2023)
The project is to bring the safety benefits of Autonomous driving to all Americans by enabling
Automated driving systems(ADS) in rural environments. The goal is to develop a systematic and
scalable approach to safe integration of automated vehicles into nation's transportation system.
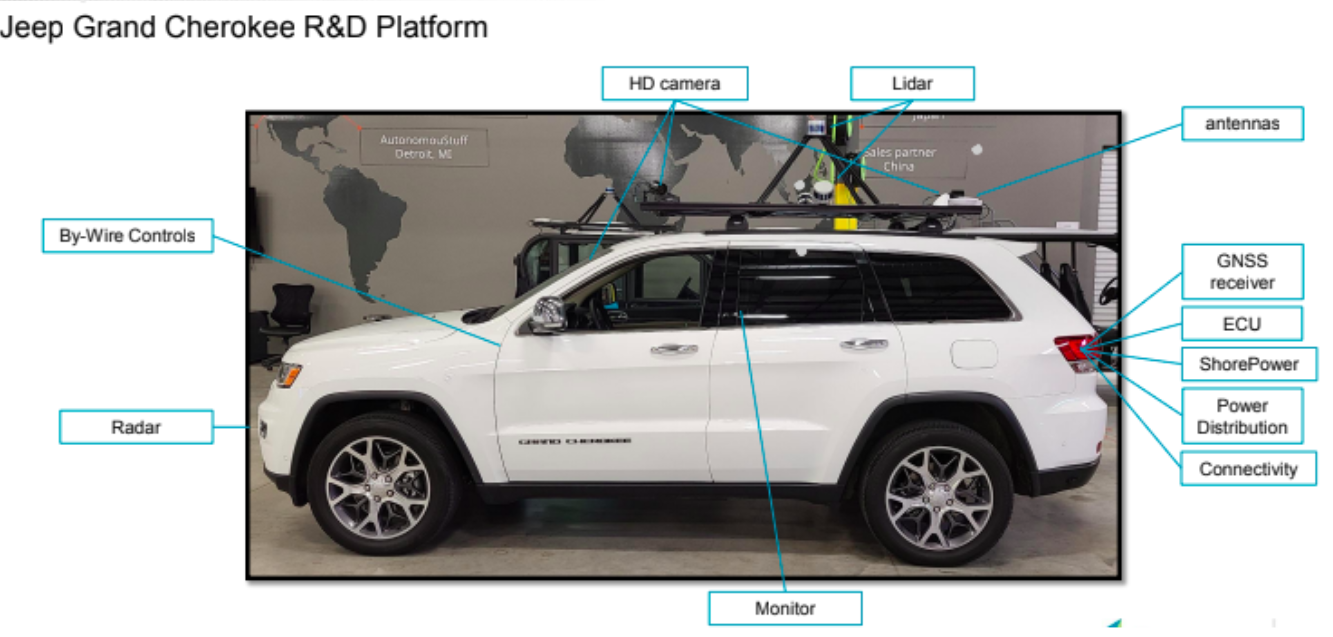
Among the various field of autonomous system, the perception is one of the most significant
field. For perception, sensors including camera, lidar, and radar are used to detect
the objects around the vehicle and transfer the Information to take an action.
Sponsor: Texas DOT (Department of transportation)
Project Website: AVA: Autonomous Vehicle for All

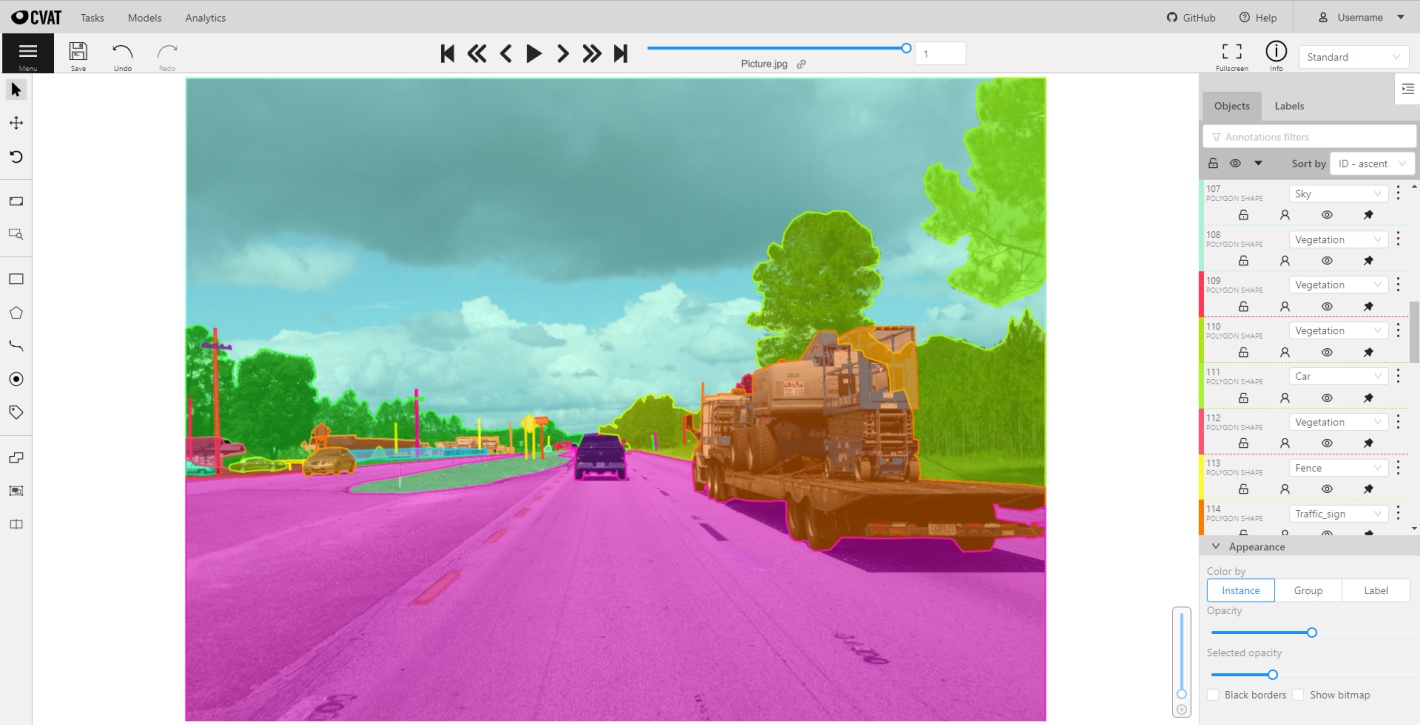
1. Data Collection & Annotation
To develop models for autonomous vehicle, the data is collected and labeled.
We collect a data by driving the vehicle around college and selected route. The collected
data includes image, video, point cloud, IMU and GPS data, and etc and recorded in rosbag.
The data is labeled for 2D obejct detection, segmentation, and road & lane detection.
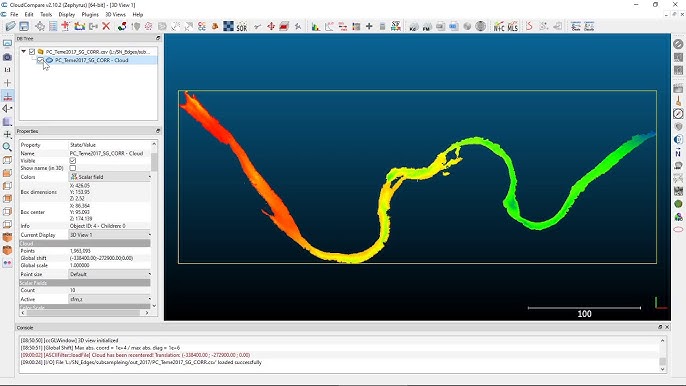
2. Edit and Create Vector Map
From the rosbag, we extract the point cloud data and create the vector map by cleaning, filtering
and vectorizing the raw data. Through this work, multiple vector maps are created and with these
maps, we integrate to make them in single vector map. Finally, we validate and refine the vector
map by comparing the shape of route to fianl work.
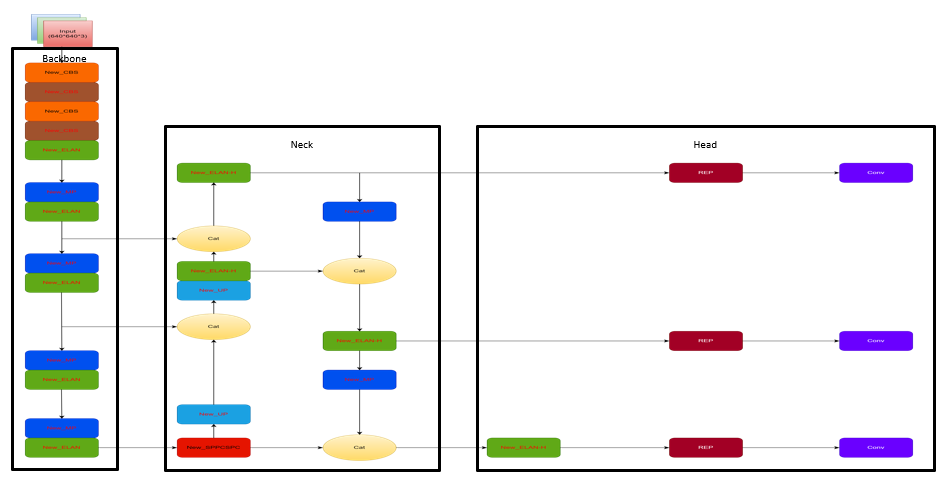
3. Research & Develop of model
After the data is completely collected and annotated, we use them to
develop the model. However, they are required to be adjusted
based on the quality of dataset, usage of model, and etc.
For research & development, we try many different methods
including modifying architecture of the model or structure of
the module of the model, hyper-parameter, scheme of training,
modifiying loss function, fine-tuning with pre-trained model
and so on.
4. Implement Algorithm in Simlation
By implementing models in environment from recorded rosbag, we validate models and algorithms
are working properly before loading to the vehicle and testing in real time and real world.
5. Test Algorithms in the field (in Real Time & Real World)
Once models and algorithms are verified in simulation, we load them in actual vehicle.
And we integrate them in launch file to run simultaneously. While testing in real time and real world,
if any defects or weaknesses are observed, we collect the data by recording them in rosbag.
After several reviews and compensation, we repeat step 3 and 4 repeatedly.